

Calibrating the new WAAM system
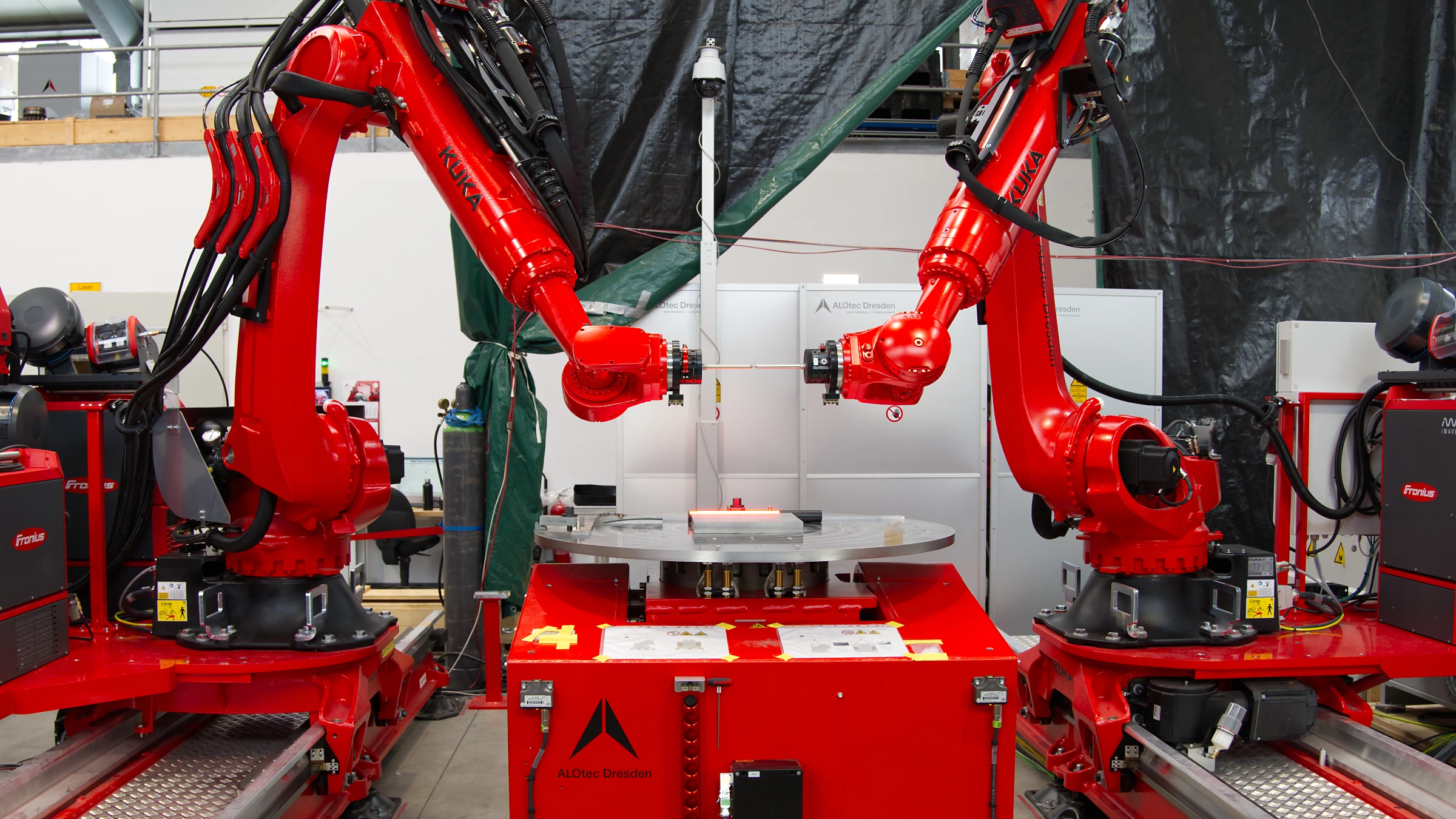
Calibration has been completed for the collaborative WAAM robot system at BTU Cottbus. Precise work with 16 axes and 2 welding torches requires accurate calibration and referencing of the robot systems and robot peripherals, such as positioners and linear units.

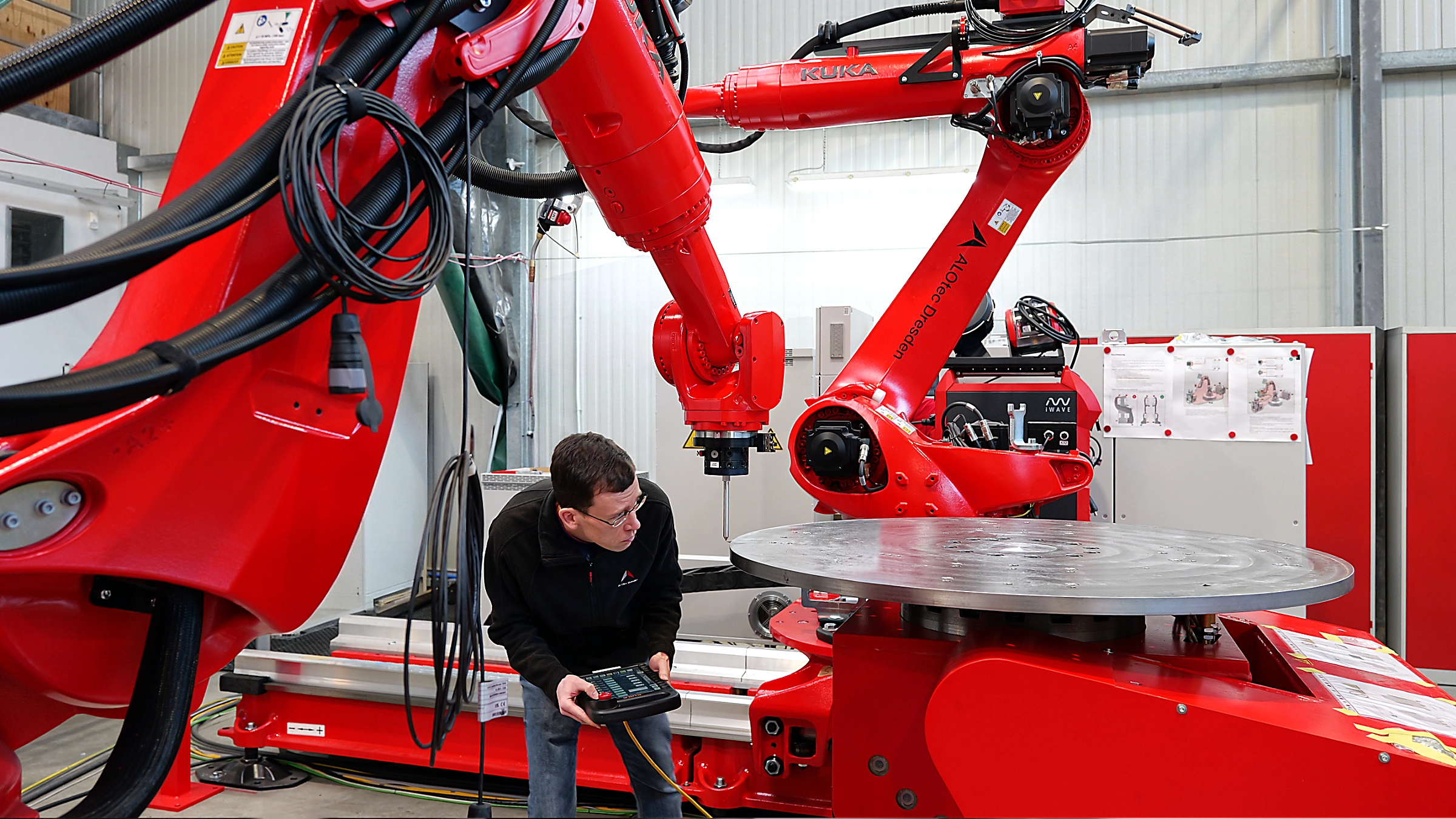


![]() The following steps were taken to precisely calibrate the system:
The following steps were taken to precisely calibrate the system:
- Referencing and calibration of the rotary tilt table (positioner) and linear units
- Calibration of the welding heads of the iWave systems and the TPS/i TWIN system from Fronius
- Verification of all axes of the welding system using the reference probe assembly
- Test synchronization of the robot axes
The system is now successfully calibrated. Programming for the first weld seams can begin.
More background information and pictures about this WAAM system can be found here.