

Research project: LAFUM-RO
The overall objective of the project “Laser-based functionalization of forming tools with industrial robots” (LAFUM-RO) is the development of a technology concept and manufacturing process for the direct, cost-efficient and adaptive production of functionalized surfaces on 3D forming tools.
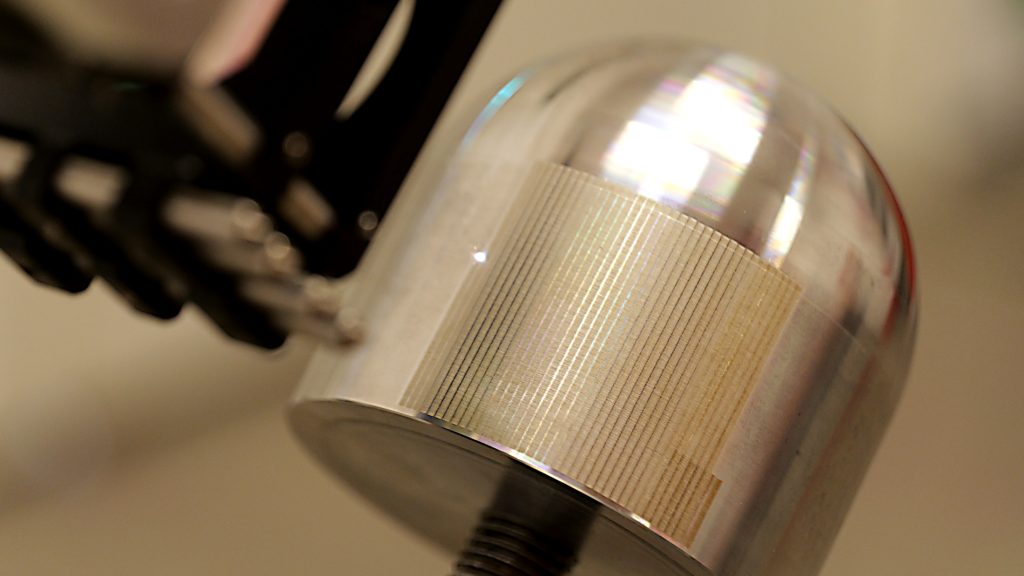
The production of such novel 3D forming tools with functionalized surfaces should enable a wide range of applications, e.g. in mechanical engineering or vehicle construction (e.g. deep drawing) under economical conditions. The high technological requirements, e.g. the longer service life of the sheet metal forming industry (improved deep drawing processes with lower stamping force, no bottom cracks in the product with high flexibility of the sheet metal shapes achieved), must be met so that a new market segment for laser precision processing systems from ALOtec Dresden GmbH and EdgeWave GmbH can be opened up.
From path to result
Research project LAFUM-RO
1. Single-pulse ablation
In order to investigate the behavior of the laser, individual pulses were omitted and the ablation behavior with increasing laser fluence was examined. It can be clearly seen that the size of the ablation area increases with increasing fluence.
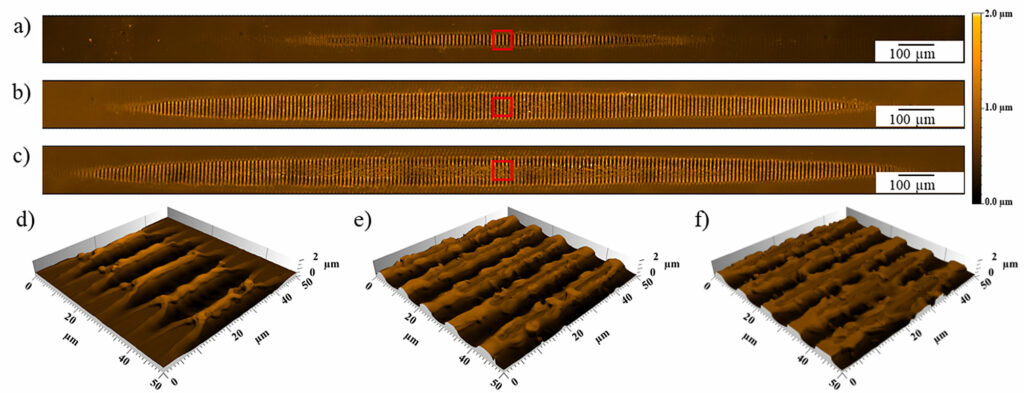
Confocal microscopy images of DLIP structured; (a, d): Φ = 2,6 J/cm²; (b, e): Φ = 4,7 J/cm²; (c, f): Φ = 5,6 J/cm².
2. Multi-pulse ablation
In order to achieve full-surface structuring, the pulse frequency was increased so that the individual pulses are directly adjacent to each other. An important parameter for determining the quality is the homogeneity factor H, which is determined on the basis of the GINI coefficient. As the laser fluence increases, the homogeneity of the structures decreases. It can also be seen that the homogeneity is independent of the speed of the robot.
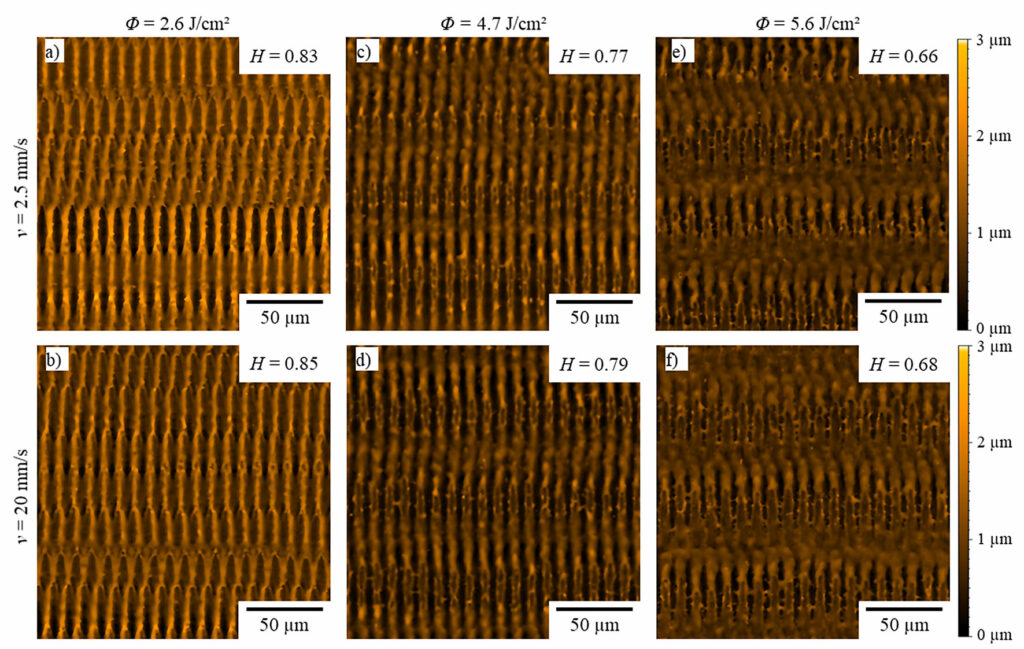
Confocal microscopy images of DLIP structures at speeds of v = 2,5 mm/s (a, c, e) and v = 20 mm/s (b, d, f) und einer Laserfluenz von Φ = 2,6 J/cm² (a, b); Φ = 4,7 J/cm² und Φ = 5,6 J/cm² (e, f).
3. Comparison of DLIP structures
Comparison of the parameters and results of structures produced using a linear unit and a robot.
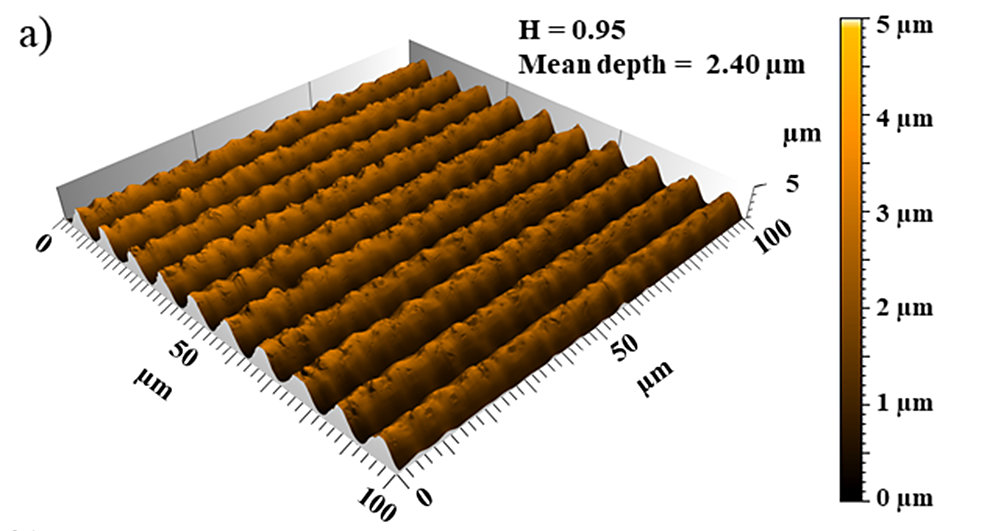
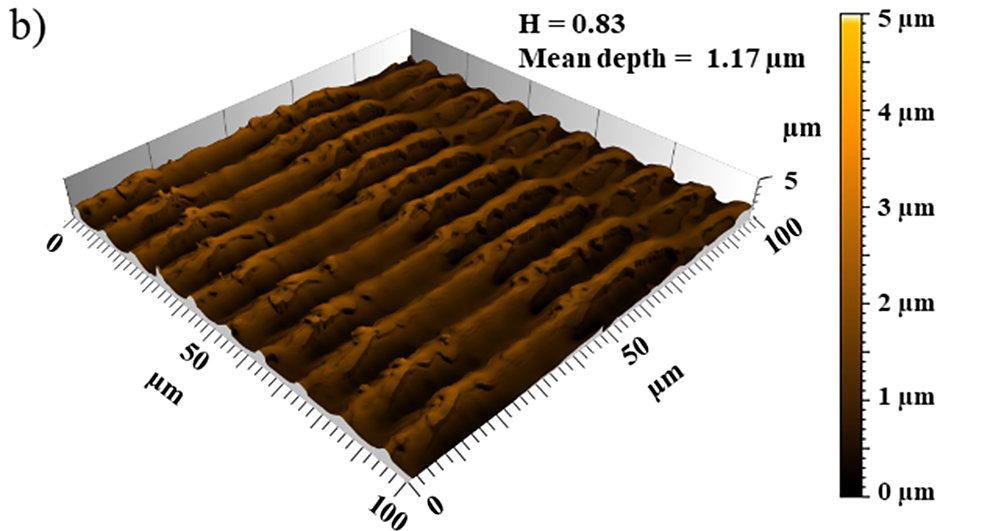
Confocal microscopy images of DLIP structures produced with a linear unit (a) and a robot (b).
| Linear unit | Robot | |
| Fluence [J/cm²] | 2,5 | 2,5 |
| Frequency [Hz] | 5000 | 100 |
| Speed [mm/s] | 100 | 2,5 |
| Overlap [%] | 85 | 0 |
| Homogeneity | 0.95 | 0.83 |
| Structure depth [µm] | 2,4 | 1,2 |
| Area rate [mm²/s] | 125 | 3 |
| Degrees of freedom | 2 | 6 |
Goal achieved! Complex 3D components can now be processed using robot-based DLIP structuring.
Project partners
ALOtec Dresden GmbH

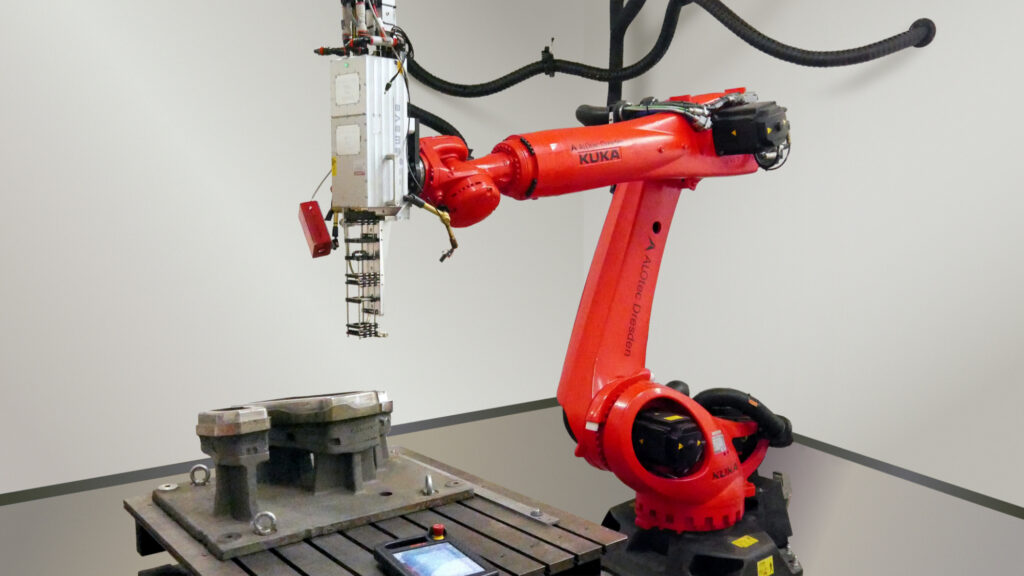
Development of a strategy for the processing of 3D parts with an industrial robot. Improvement of the long-term stability of microstructures by laser hardening.
EdgeWave GmbH

Development and construction of a compact laser system optimized for interference structuring.
TU Dresden

Optics development for robot-assisted surface functionalization; technology development and analysis of material properties
Funding of the project
The project “Laser-based functionalization of forming tools with industrial robots (LAFUM-RO)” is funded by the Central Innovation Program for SMEs (ZIM).
Funding reference number: KK5279901SY1

Want to find out more about our research?
Let’s talk.
Whether you have questions about our research and development projects or simply want to share your experiences – we look forward to hearing from you.
